Nuova sezione libri disponibile!Novità! Ecco la nuova sezione dei libri consigliati.
Archivio HotBlack Robotics
Questo è l'archivio dei blog post scritto con HBR
Usare il braccio robotico Dobot con ROS
Come usare il braccio robotico con Robot Operating System
Gabriele Ermacora
Python e sketch HBR
Sintassi base di Python e sketch HBR
Fiorella Sibona

Benvenuto a ROS 2.0
Primo contatto con ROS 2.0
Ludovico Russo

Come creare messaggi custom in ROS
Creare nuovi tipi di messaggio ROS
Fiorella Sibona

Sviluppare un rilevatore di fiamma con la visione artificiale
Sviluppare un rilevatore di fiamma con la visione artificiale
Gabriele Ermacora
Controllare siBOT dalla piattaforma HBR
Come controllare il manipolatore siBOT utilizzando la piattaforma HBR
Fiorella Sibona
Inviare Goals alla Navigation Stack - versione nodo ROS Python
Inviare un goal all ROS navigation stack utilizzando un nodo Python
Fiorella Sibona

Inviare una sequenza di Goals alla ROS NavStack usando Python
Inviare una sequenza di pose desiderate alla ROS Navigation Stack usando un nodo Python
Fiorella Sibona
Come compilare Immagini Docker per ARM su host Intel
Buildare Immagini Docker per host ARM su Intel
Fiorella Sibona
Docker, questo sconosciuto!
Perchè utilizzare Docker e la mia esperienza
Fiorella Sibona
NTBD: guida step by step
Cos'è e come utilizzare NTBD step by step, primo articolo della serie
Fiorella Sibona
Video Corso ROS Rokers - Completati i video di Introduzione
Sono disponibili online i video tutorial del corso di ROS partito dalla community Rokers
Ludovico Russo
Installiamo ROS su Raspberry Pi
Un breve tutorial su come utilizzare ROS sul Raspberry Pi
Ludovico Russo
Un robot al museo - MuFant e HotBlack Robotics
Gabriele Ermacora

Annunciamo il programma di Beta Testing di HBR Cloud API
Ludovico Russo
Come collegare il sensore DHT11 (Temperatura e umidità) in cloud
Ruslan
Webapp per il controllo del robot via frecce su WebApp
Ruslan
Collegare in cloud i LEGO NXT ed estenderne le funzionalità
Pietro Chiro
Collegare un Arduino in parallelo al raspberry
Pietro Chiro

Implementare un motore d'intelligenza artificale sul vostro bot
Ruslan
Webapp per il controllo da tastiera wasd
In questo tutorial vedremo come controllare un robot attraverso i tasti **wasd** per farlo muovere nelle 4 direzioni.
Pietro Chiro
Accedere al Terminale Linux di HBrain da Browser
Ludovico Russo
Rilascio HBrain v0.5.2
Ludovico Russo
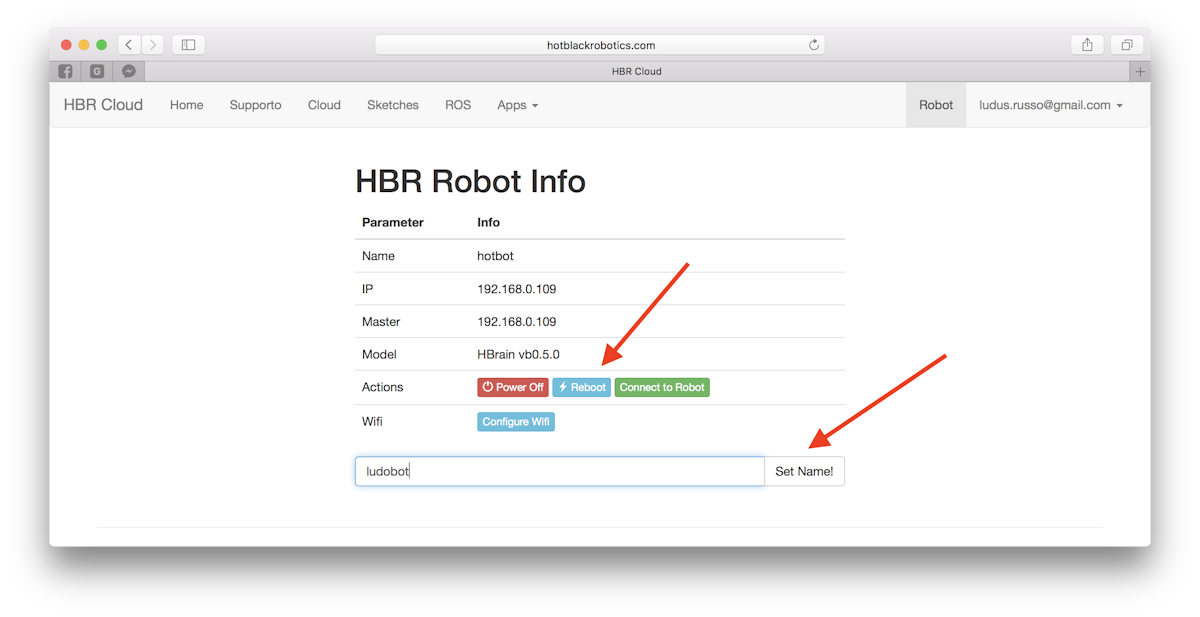
Cambiare nome al Robot DotBot da piattaforma
Ludovico Russo

Nasce Rokers, la community di Robot Makers
Ludovico Russo
Apre HBR Community, il nuovo sistema per la condivisione di progetti Robotici
Ludovico Russo
Hackeriamo oggetti per costruire un robot completo
Ludovico Russo
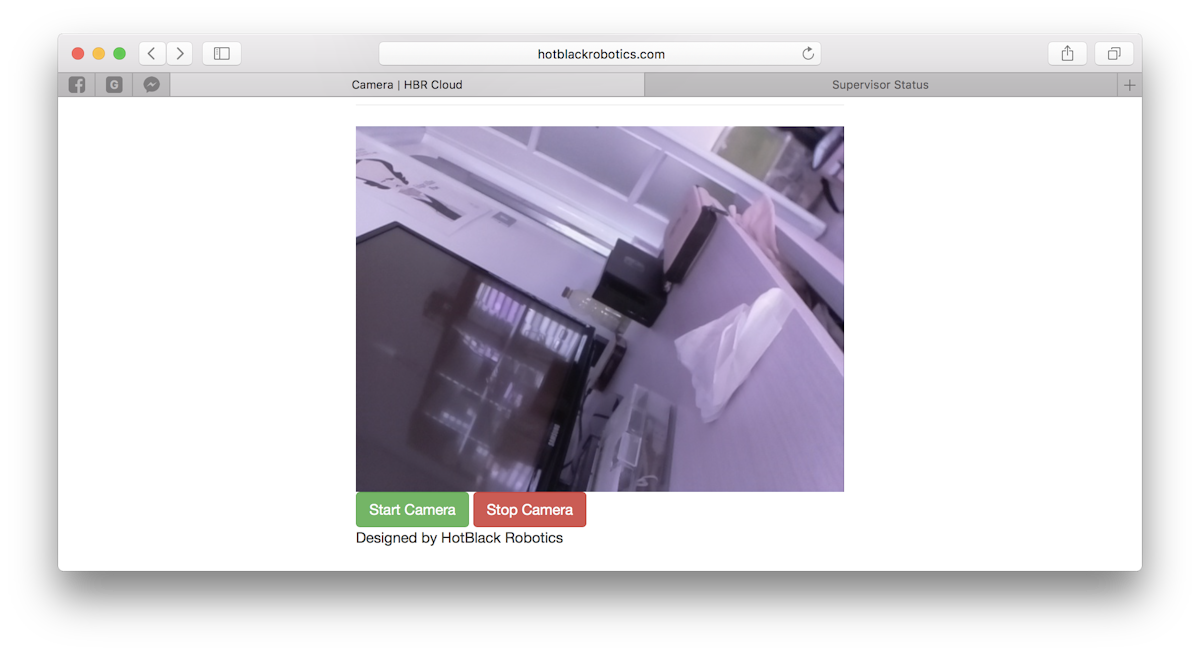
Utilizzare la RaspiCam in streaming con la piattaforma Cloud
Breve tutorial che spiega come abilitare la RaspiCam su ROS e la piattaforma di Cloud Robotics
Ludovico Russo
Pycon 2017 - Links & Info
Gabriele Ermacora
Implementiamo un subscriber con un interruttore
Gabriele Ermacora
Configurare il robot DotBot
Gabriele Ermacora
Immagine SD per la cloud e configurazione
Gabriele Ermacora
RomeCup - Links & Info
Gabriele Ermacora
Come collegare un robot comprato da Tiger (Spider Robot) in piattaforma cloud !!
Gabriele Ermacora
SpiderBot Cloud con controllo vocale!
Gabriele Ermacora
SpiderBot Cloud 2.0 la vendetta - 2 gradi di libertà e controllo vocale
Gabriele Ermacora
Analizziamo il codice del primo esempio - blink LED
Gabriele Ermacora
Iniziamo a programmare!
Gabriele Ermacora
Installare nuove librerie sul HBRain (temporaneamente)
Ludovico Russo
Il fondamento della piattaforma di Cloud Robotics: Robotics Operating System
Ludovico Russo
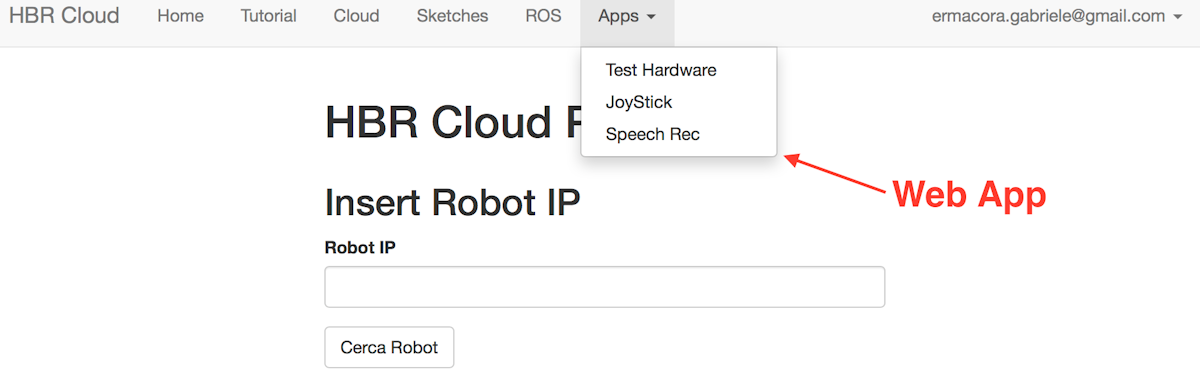
Come creare una semplice Web App per interagire con il vostro robot
Gabriele Ermacora
Tutorial - Sviluppiamo un Bot Telegram in ROS
Ludovico Russo
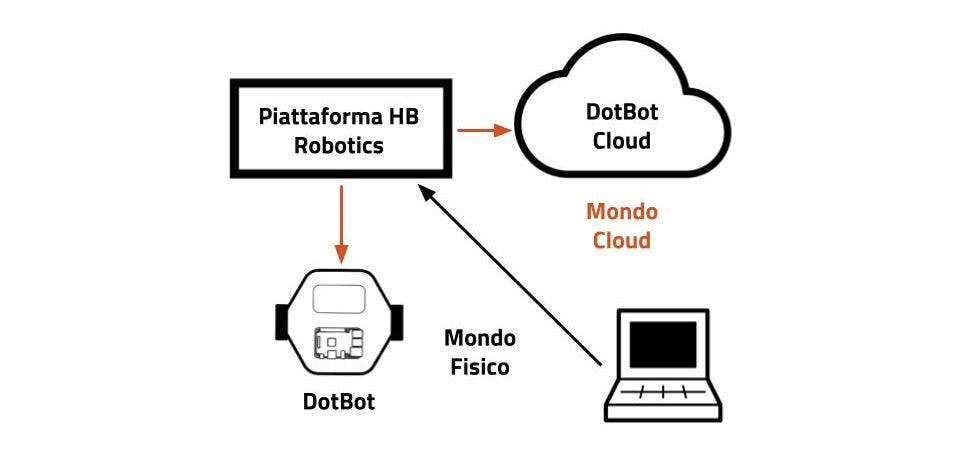
Tutorial - Usiamo la piattaforma di Cloud Robotics per sviluppare un semplice assistente personale Robotico
Usiamo la piattaforma di Cloud Robotics per sviluppare un semplice assistente personale Robotico
Gabriele Ermacora
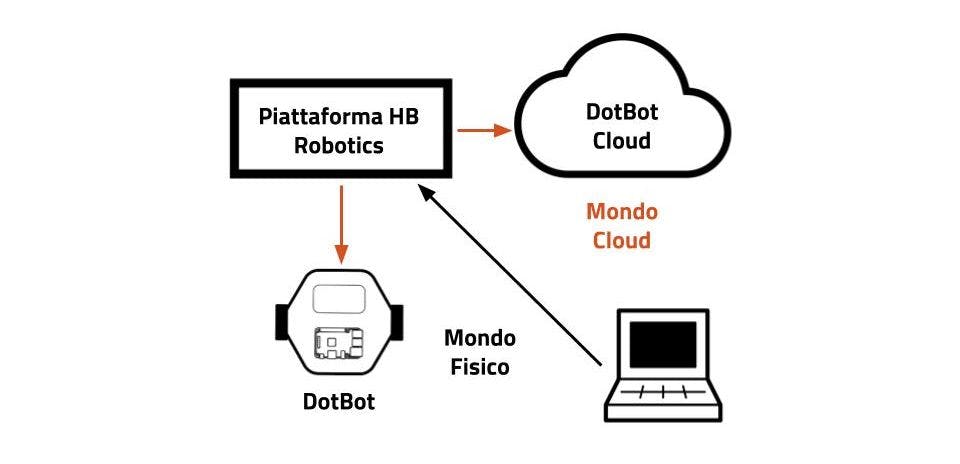
Cosa si può fare con la nostra piattaforma di Cloud Robotics
Ecco alcune cosa che è possibile fare con la nostra piattaforma di Cloud Robotics
Ludovico Russo

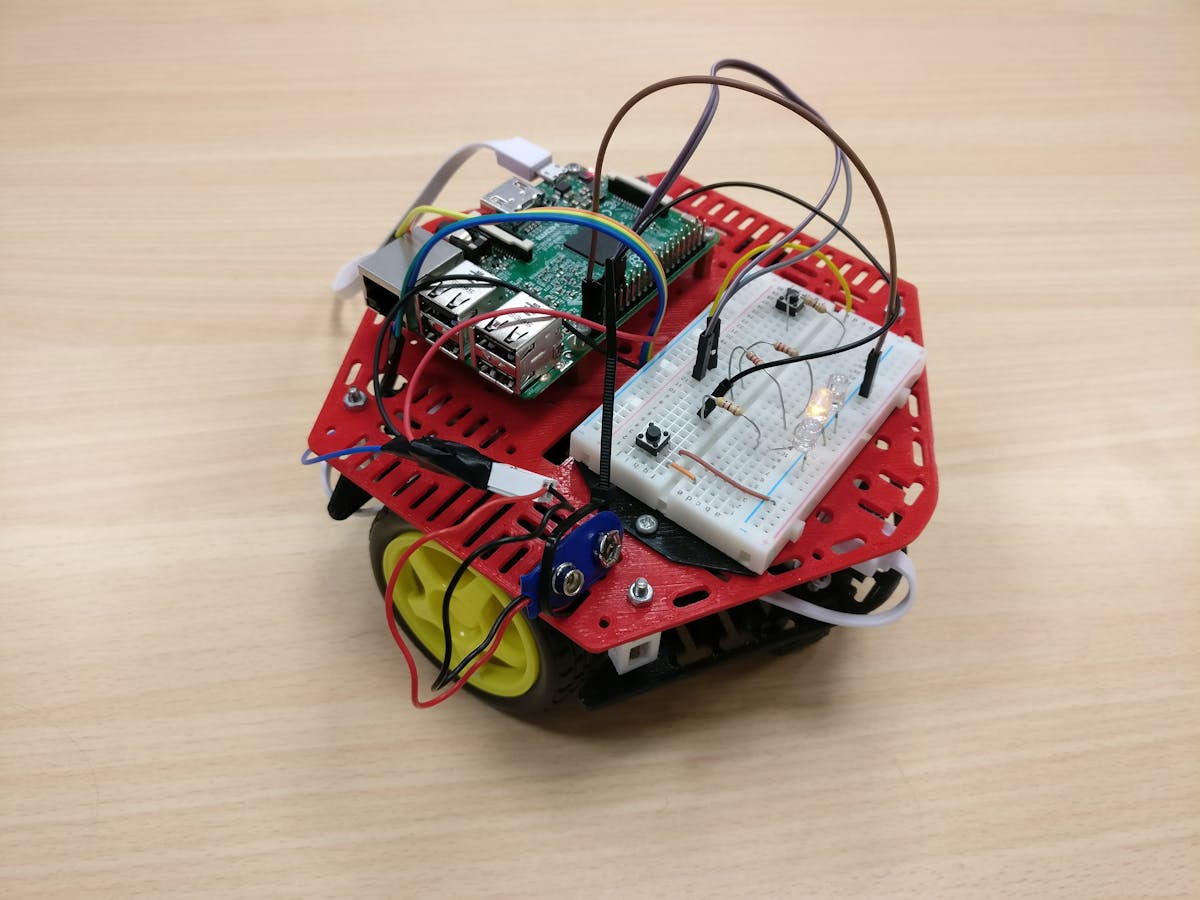
Tutorial hardware - Come costruire il robot Dotbot
Gabriele Ermacora
Non avete un robot? C'è il robot in cloud accessibile da remoto tramite il vostro PC o da cellulare
Non avete un robot? C'è il robot in cloud accessibile da remoto tramite il vostro PC o cellulare
Gabriele Ermacora
Avete problemi hardware? C'è il robot in cloud accessibile da remoto tramite il vostro PC o cellulare
Avete problemi hardware? C'è il robot in cloud accessibile da remoto tramite il vostro PC o cellulare
Gabriele Ermacora
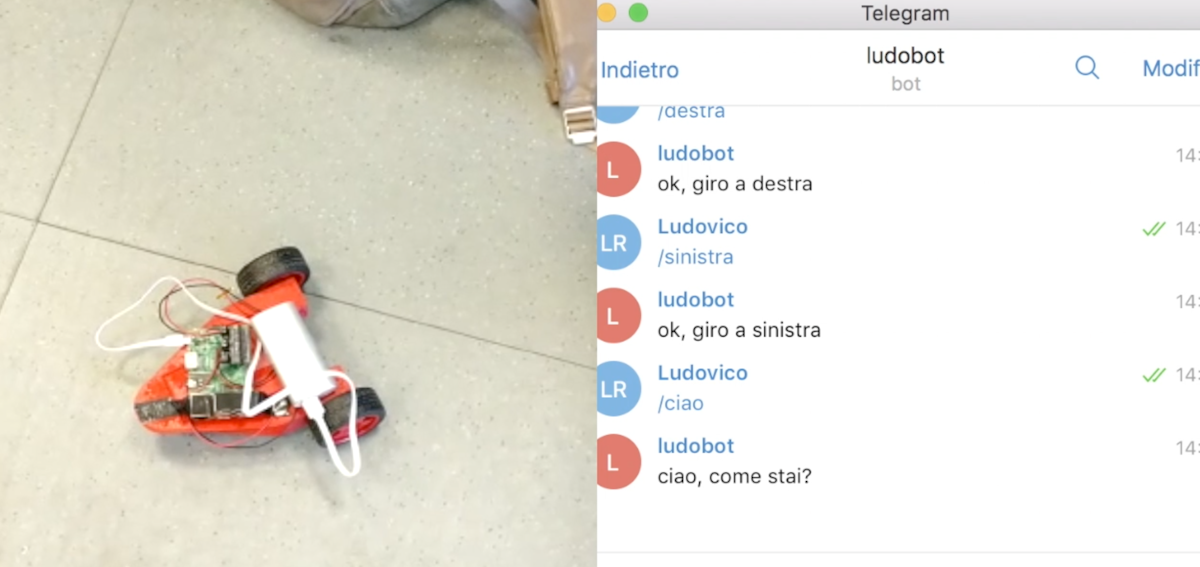
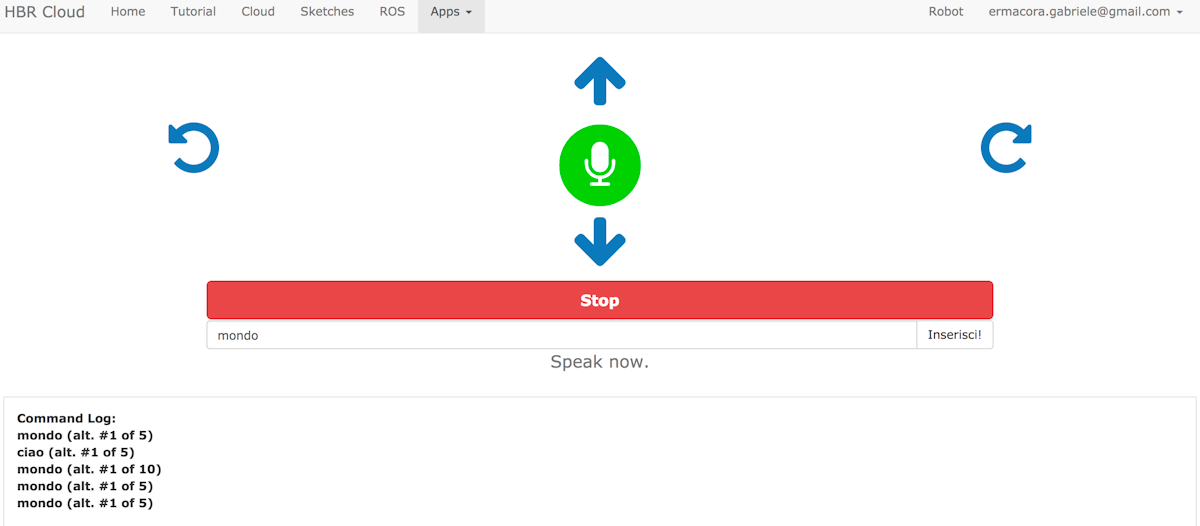
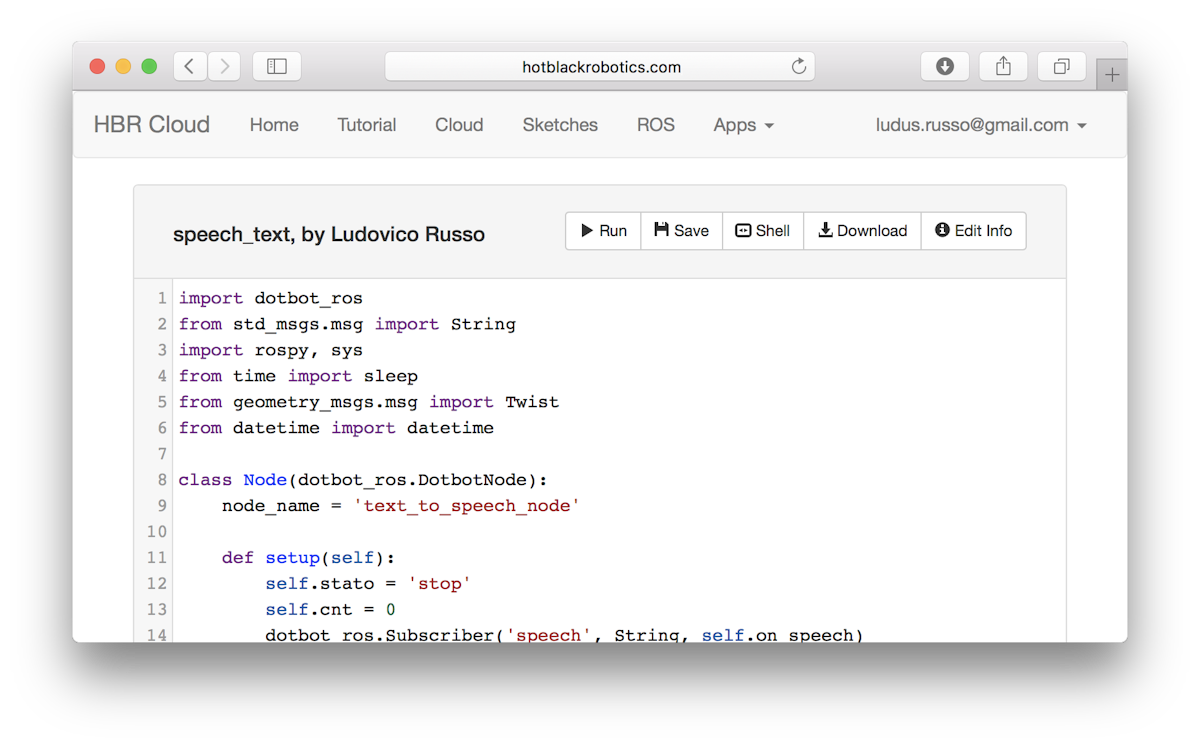
HB Cloud Tutorial - Speech Bot: come far parlare il vostro robot
Le basi per costruire un "dialogo" con il vostro robot sfruttando le funzionalità di sintesi e riconoscimento vocale.
Gabriele Ermacora
HB Cloud Tutorial #3 - I Motori
I Motori sono una delle parti essenziali dei robot. In questo tutorial, vederemo come è possibile in modo semplice ed intuitivo implementare un programma in Python che controlla i motori in base a comandi inviati via Wifi al Robot.
Ludovico Russo
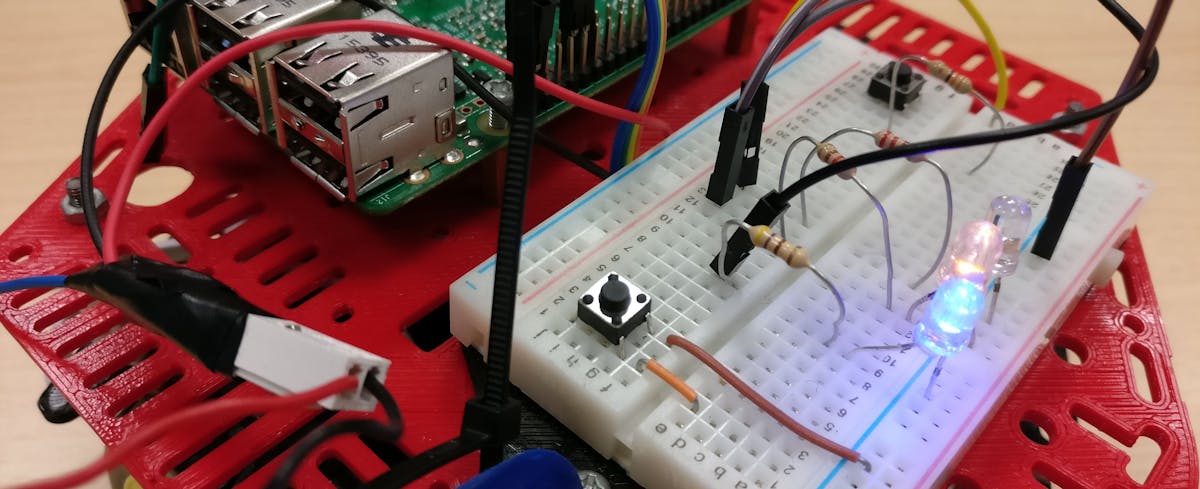
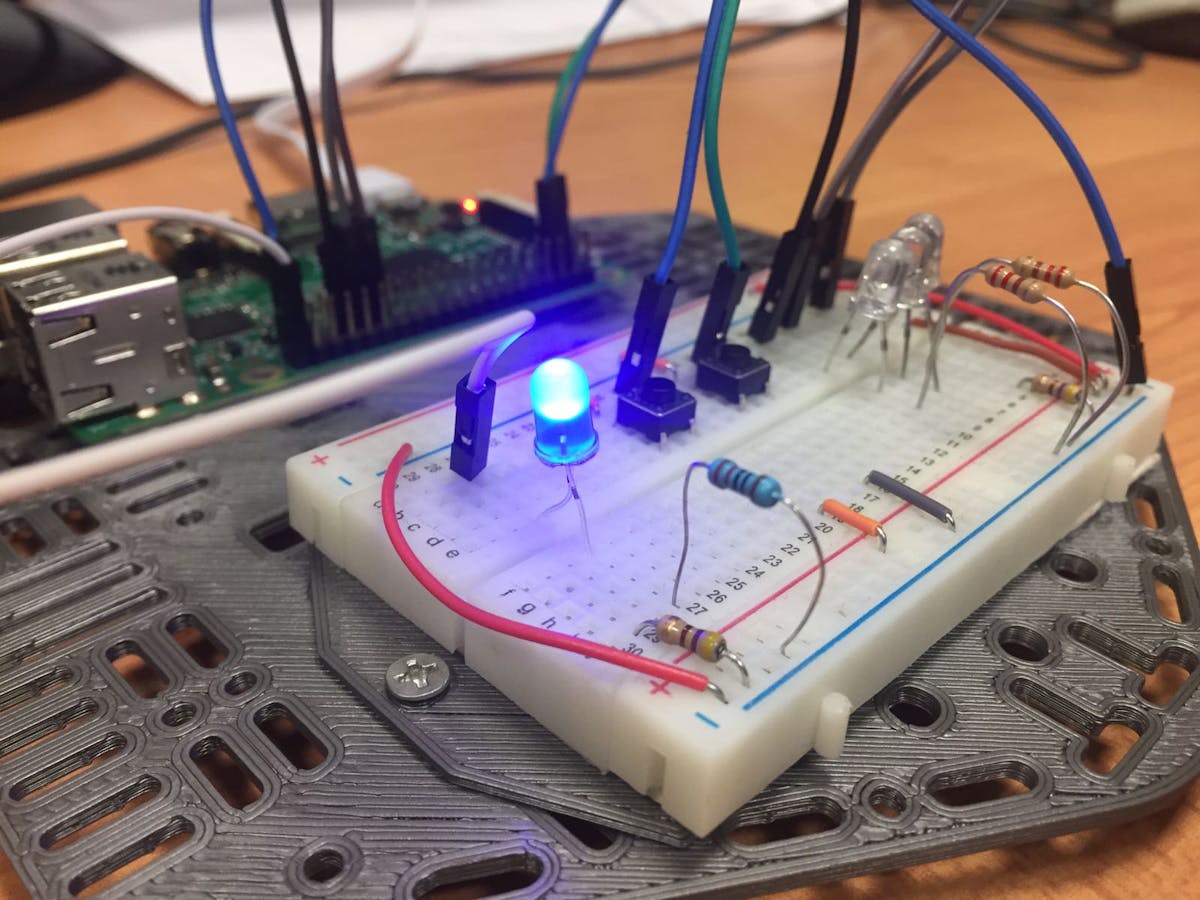
HB Cloud Tutorial #2 - Uso dei Bottoni
Rieccomi con il secondo tutorial legato all'uso dei bottoni per il robot **DotBot-ROS**. In questo tutorial, vedremo come configurare ed utilizzare in Python un bottone attaccato ad un pin GPIO del Raspberry Pi 3.
Ludovico Russo
HB Cloud Tutorial #1 - Uso dei Led
Iniziamo ad utilizzare la piattaforma di Cloud Robotics
Ludovico Russo