Tutorial hardware - Come costruire il robot Dotbot

Qui di seguito un breve tutorial su come assemblare il robot Dotbot. In questo tutorial ci dedichiamo ad assemblare il robot. Inoltre sono linkate le parti da stampare in 3D. Un grazie speciale a Michele Maffucci da cui ho preso gran parte (o quasi tutto) per questo tutorial! Vedi gli altri tutorial per la configurazione e la programmazione dei dotbot.
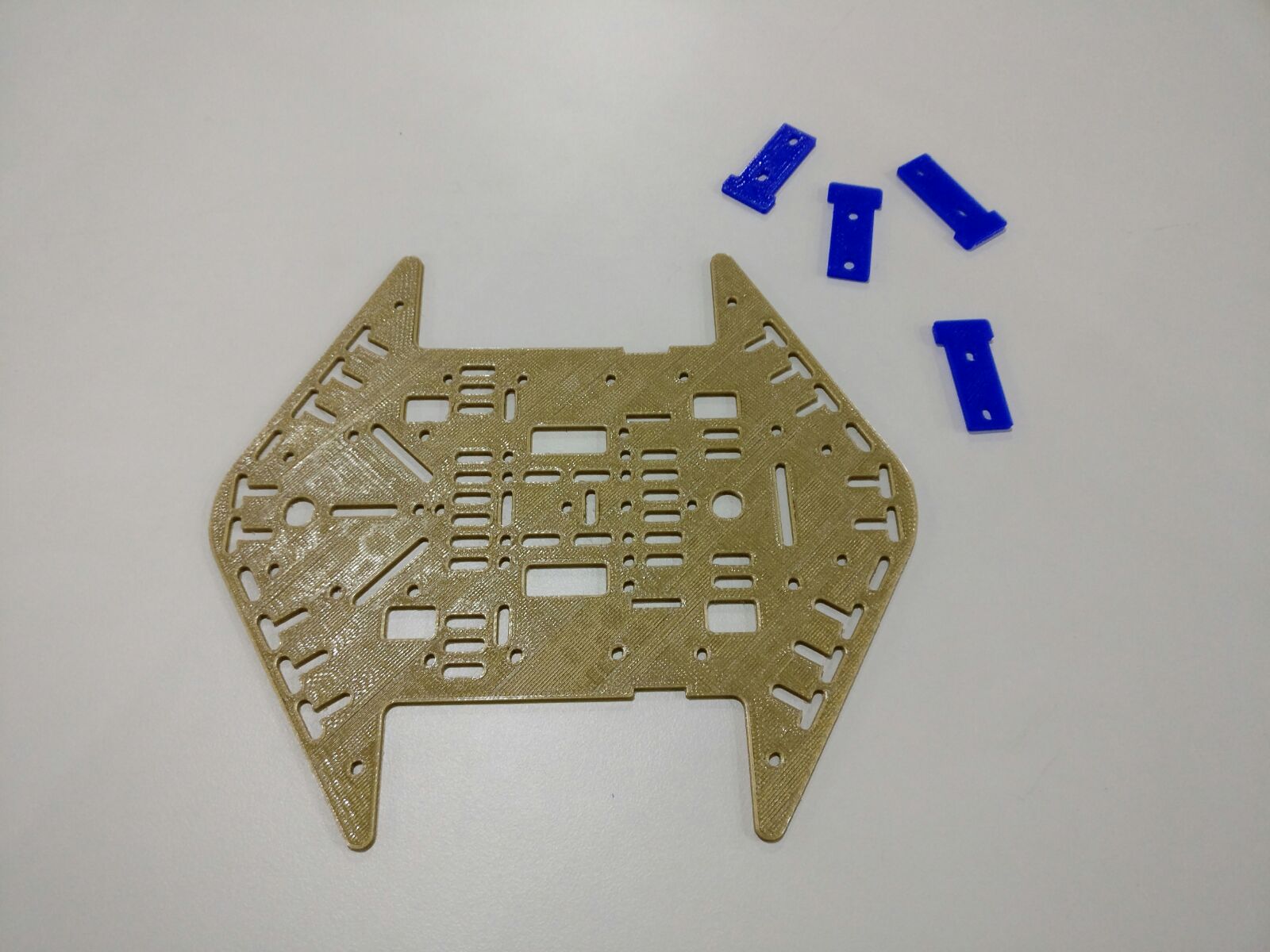
La lista delle parti meccaniche
Le parti si possono stampare con una stampante 3D (noi abbiamo usato una ShareBot e stampiamo in PLA) e i link ai file STL sono in blu.
-
1 X db-bottom.stl
-
1 X db-supports.stl [il file è unico ma i supporti per il motori da stampare sono 4]
-
1 X db-top.stl
-
8 x supporti rettangolari db-rect.stl
-
1 X db-supports.stl [il file è unico ma i supporti per il motori da stampare sono 4]
-
1 X db-top.stl
-
8 x supporti rettangolari db-rect.stl
-
4 x bulloncini di supporto al Raspberry
La lista dei componenti
-
4 viti M3 da 30 mm
-
4 viti M2 da 16 mm
-
14 viti M3 da 16 mm
-
2 viti M3 da 10 mm
-
18 bulloni M3
-
4 bulloni M2
-
2 biglie di vetro
-
2 motorini CC e 2 ruote link per acquistarli
-
1 scheda driver motori link per acquistarli
-
1 batteria power bank link per acquistarli
-
1 breadboard da 400 fori
-
1 una batteria alcalina da 9 Volt (opzionale - per alimentare i motori in parallelo al Raspberry)
-
LED, interruttori, resistenze, fili per i collegamenti sulla breadboard
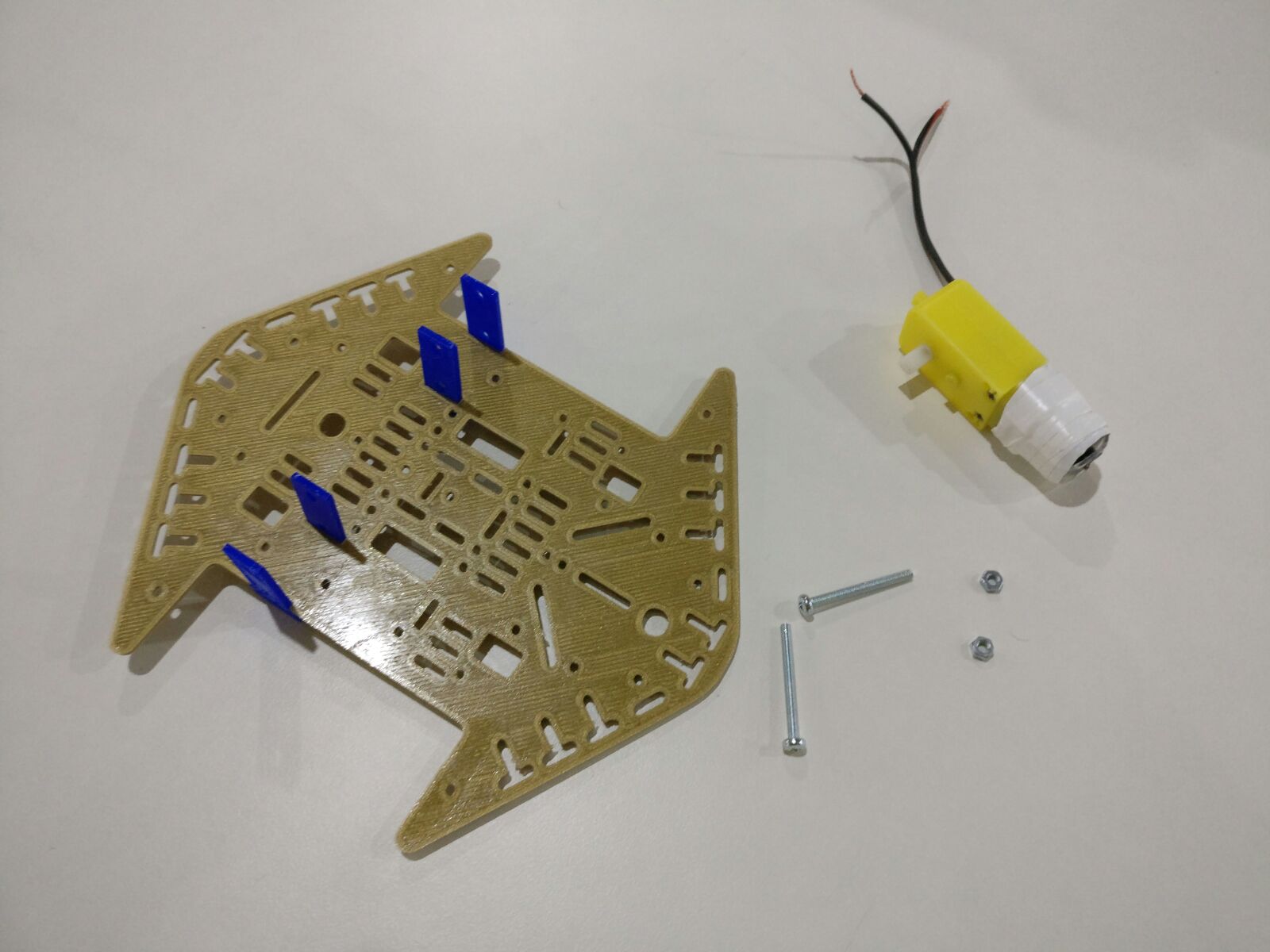
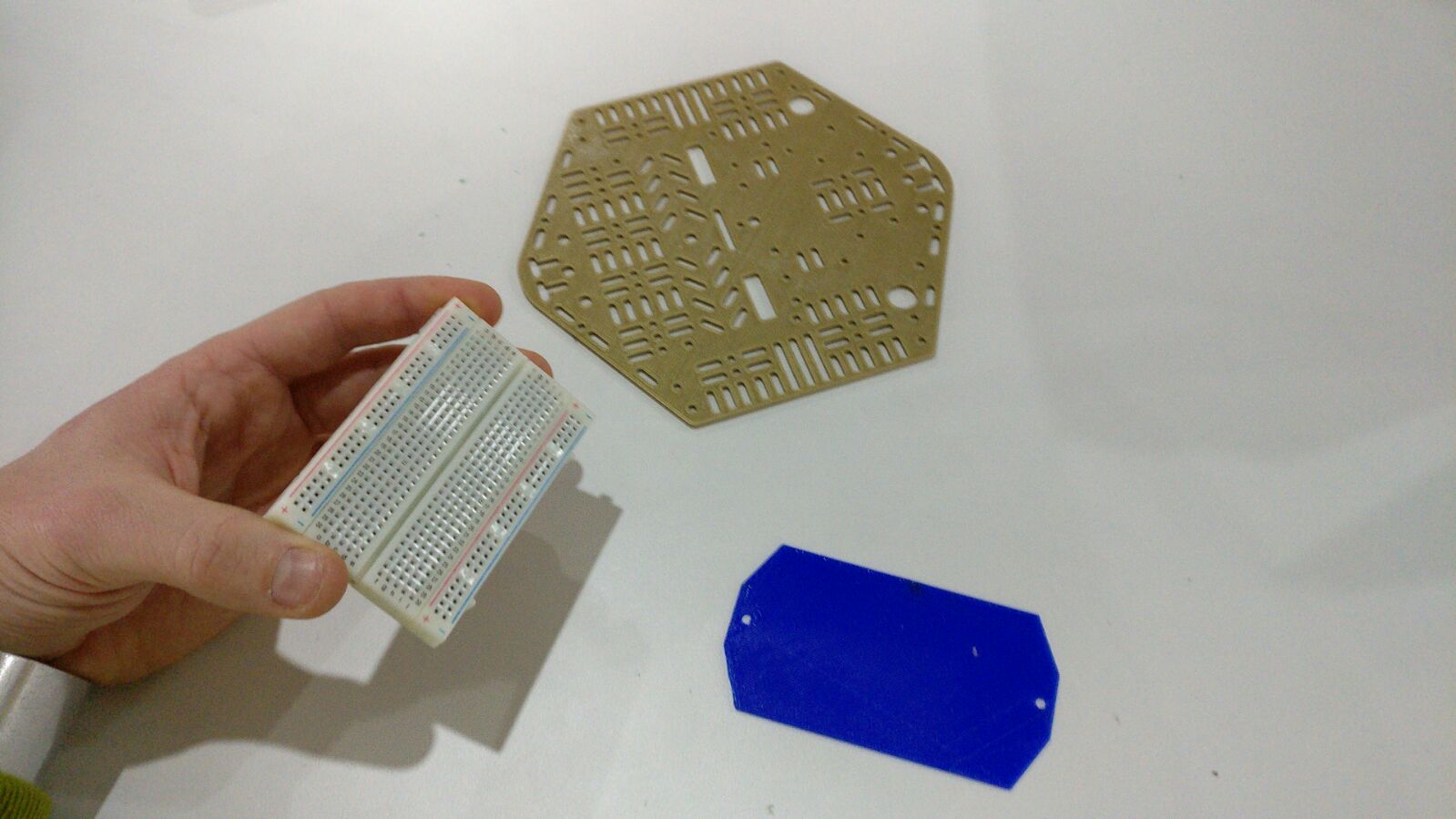
Il kit smontato e con tutti i suoi componenti sarà più o meno così:

Iniziamo a montare!
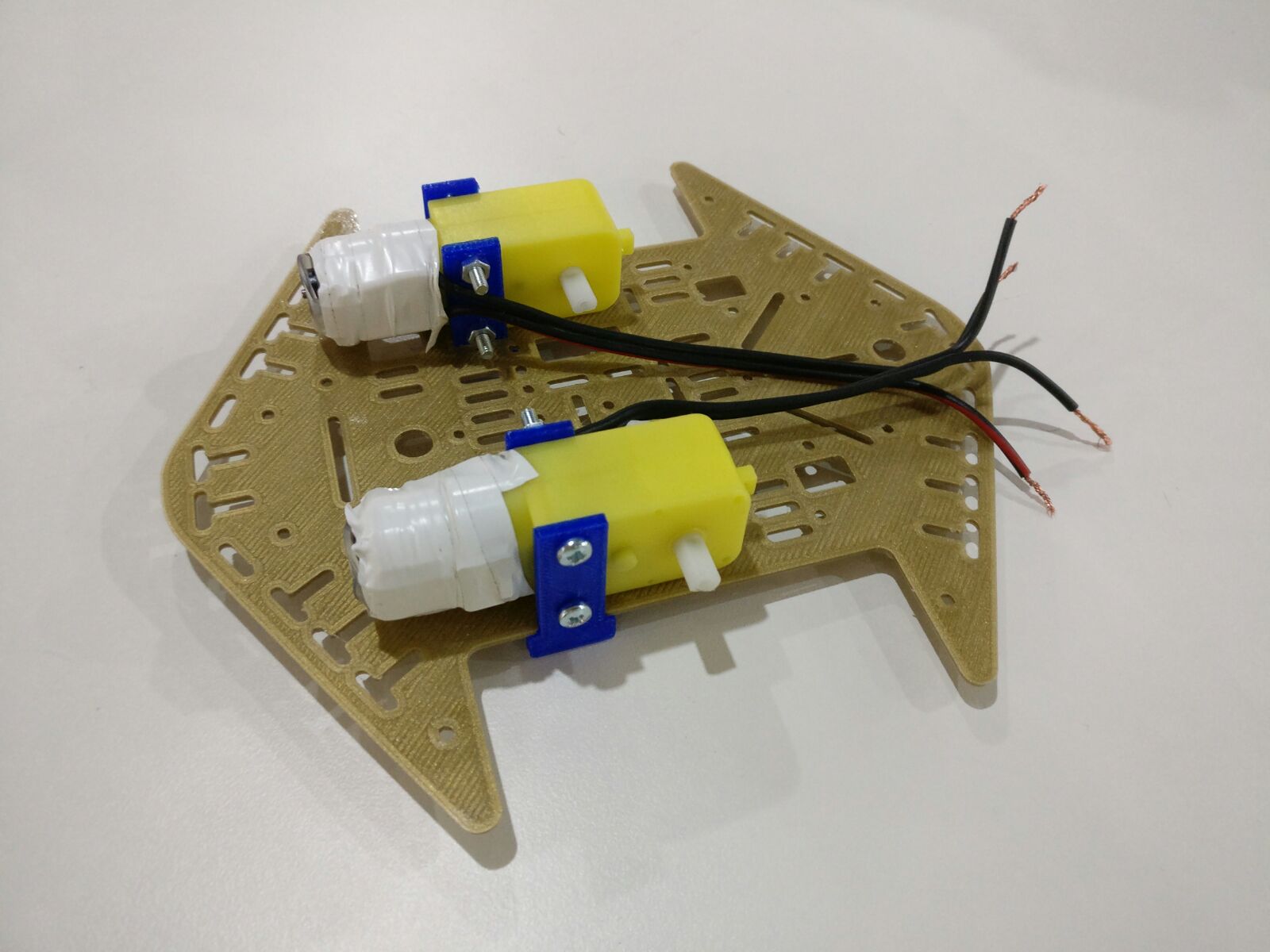
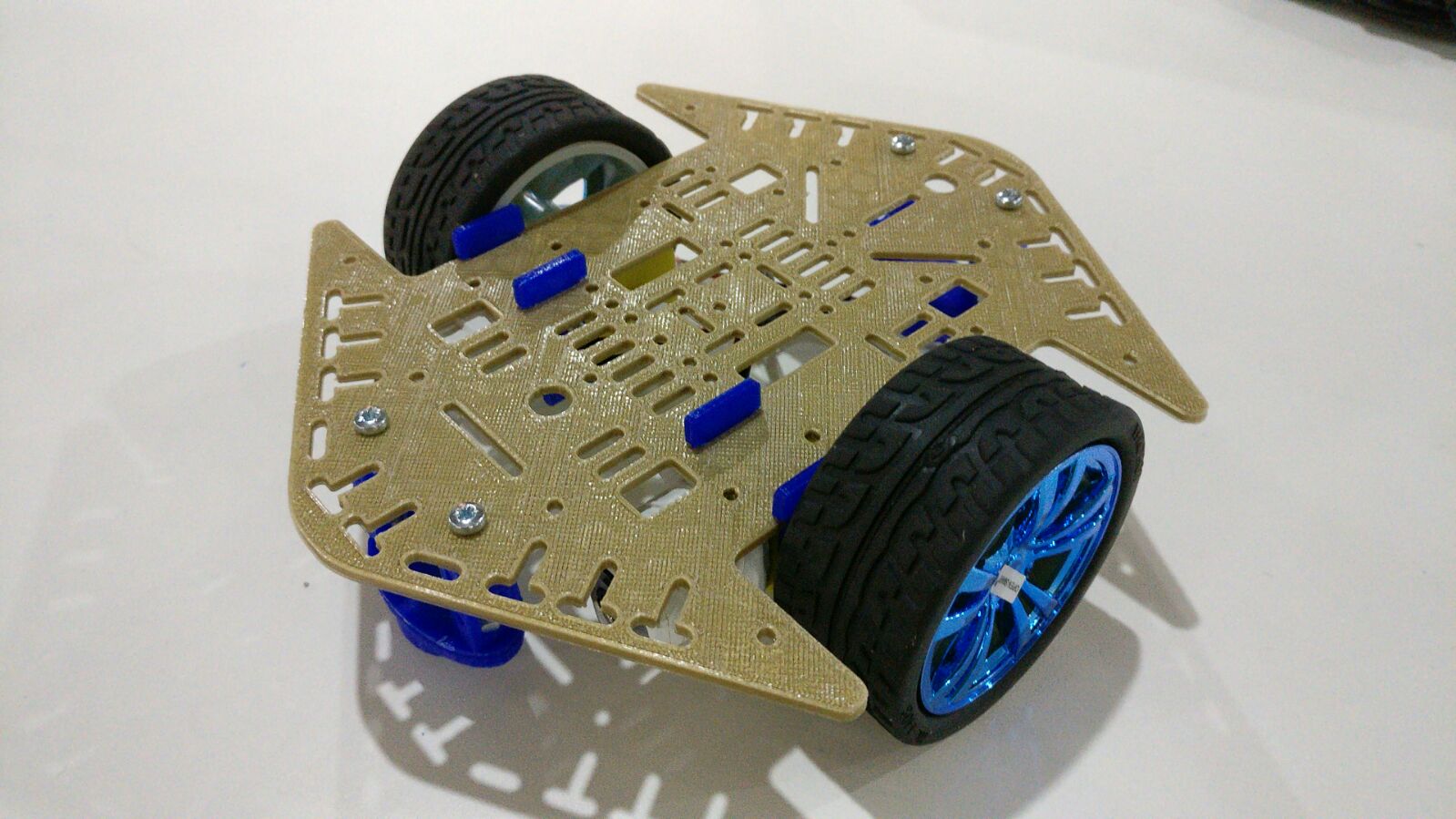
1 - Montaggio dei motori
Con le viti M3X30.
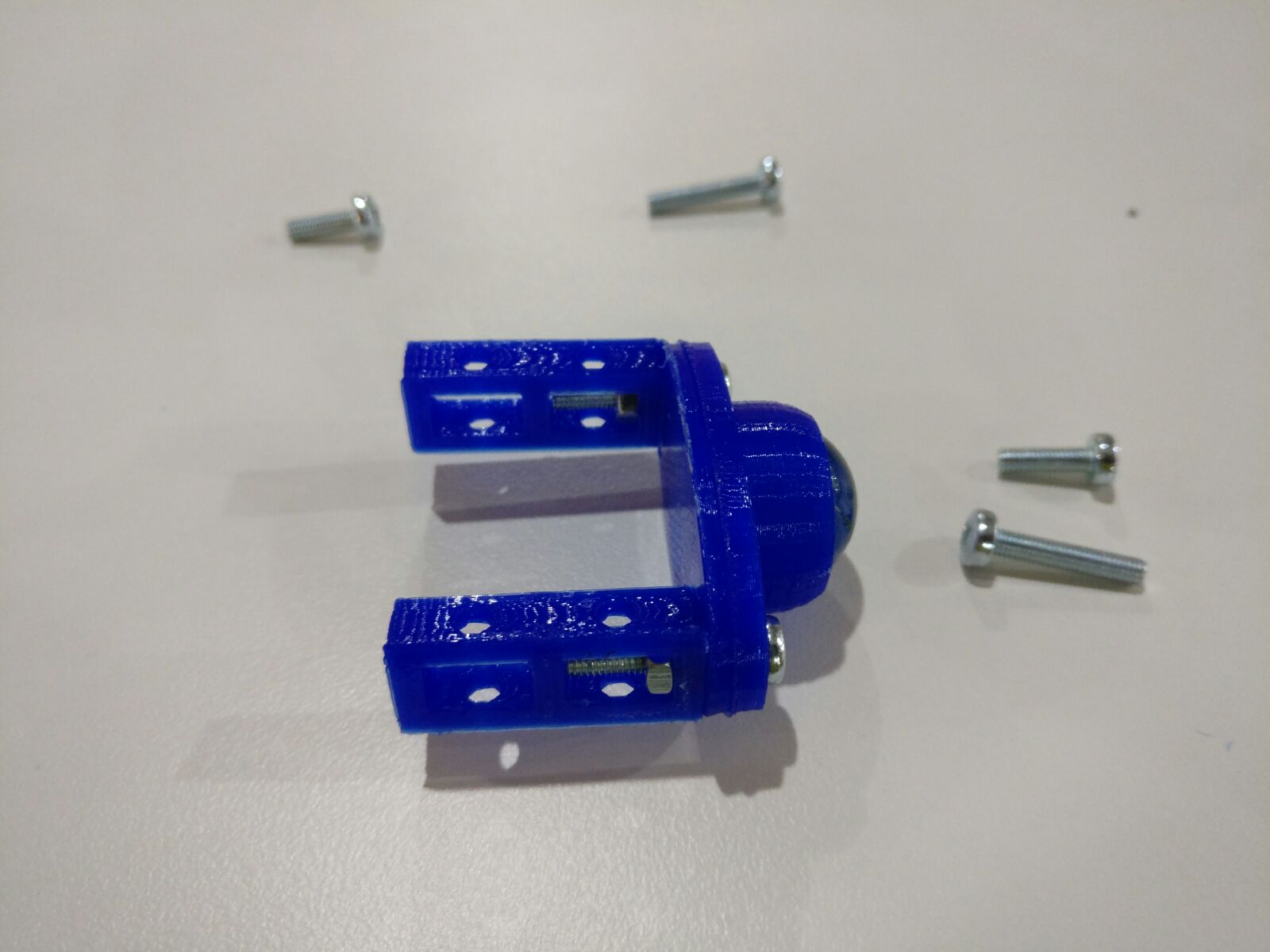
2 - Montaggio delle ruote ominidirezionali realizzate con delle biglie di vetro##
Iniziamo a montare le ruote omnidirezionali.
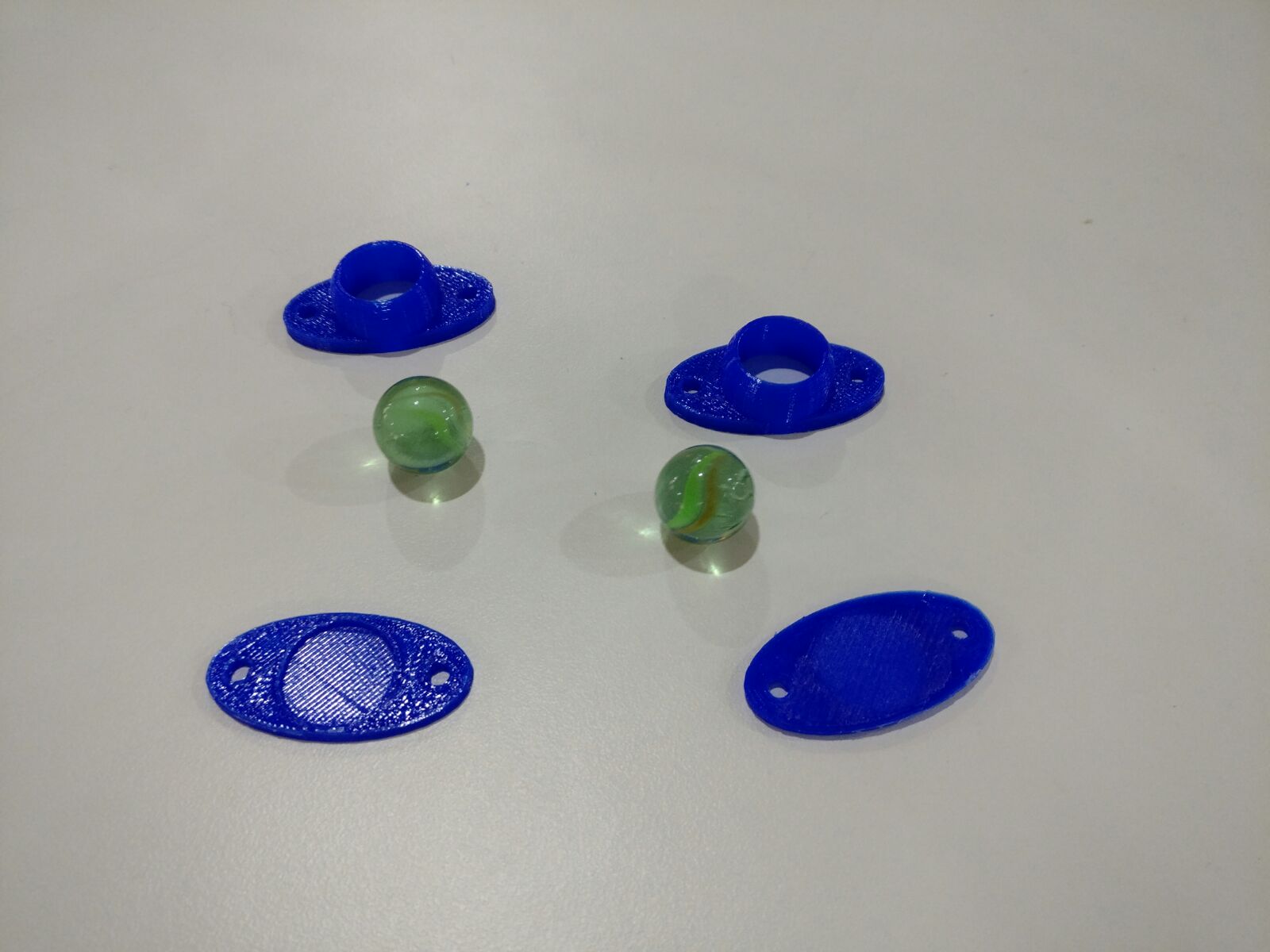
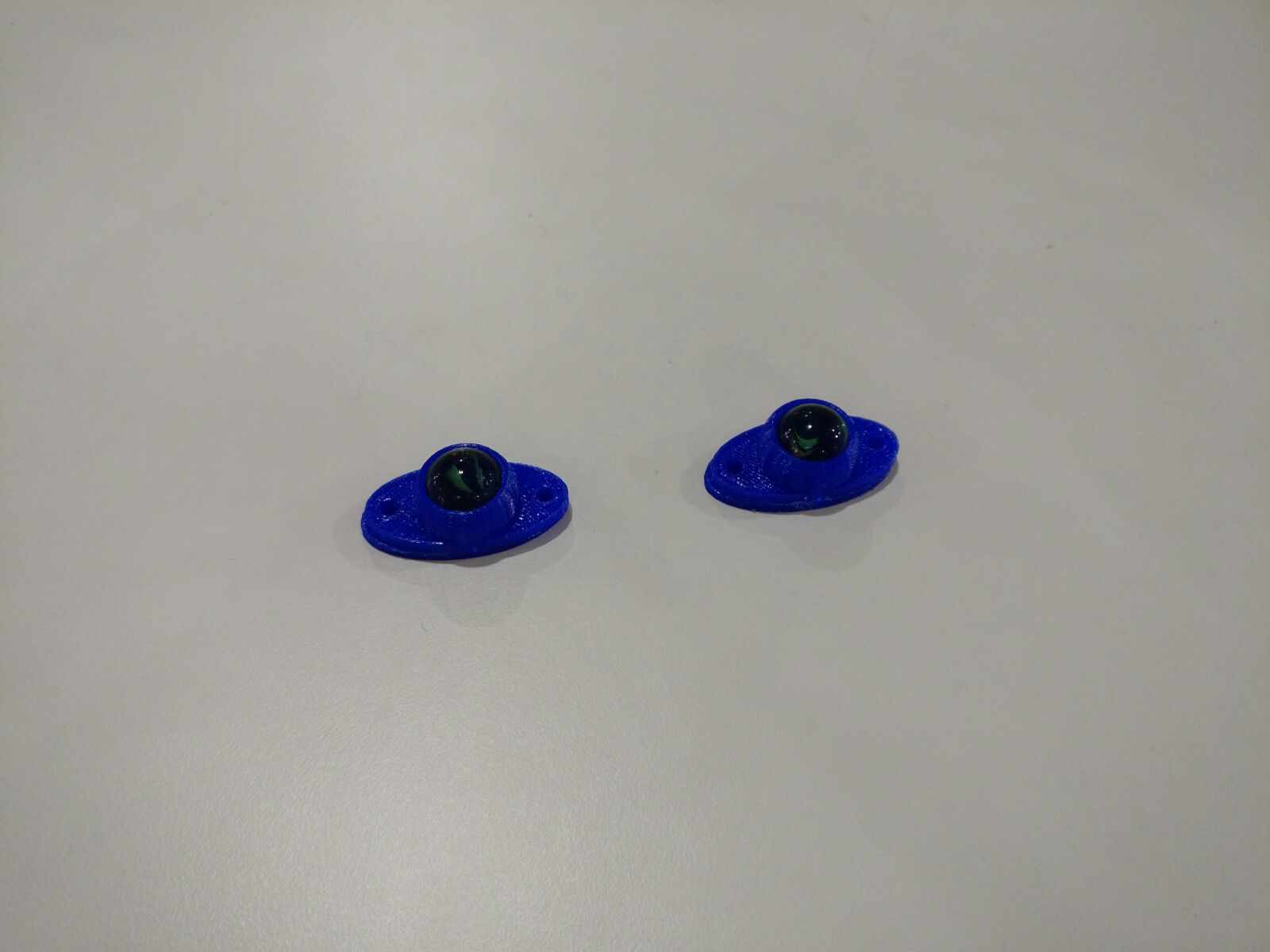
Poi montiamo i supporti con le viti M3X16, dalla parte della ruota omnidirezionale e M3X10 dalla parte della flangia.

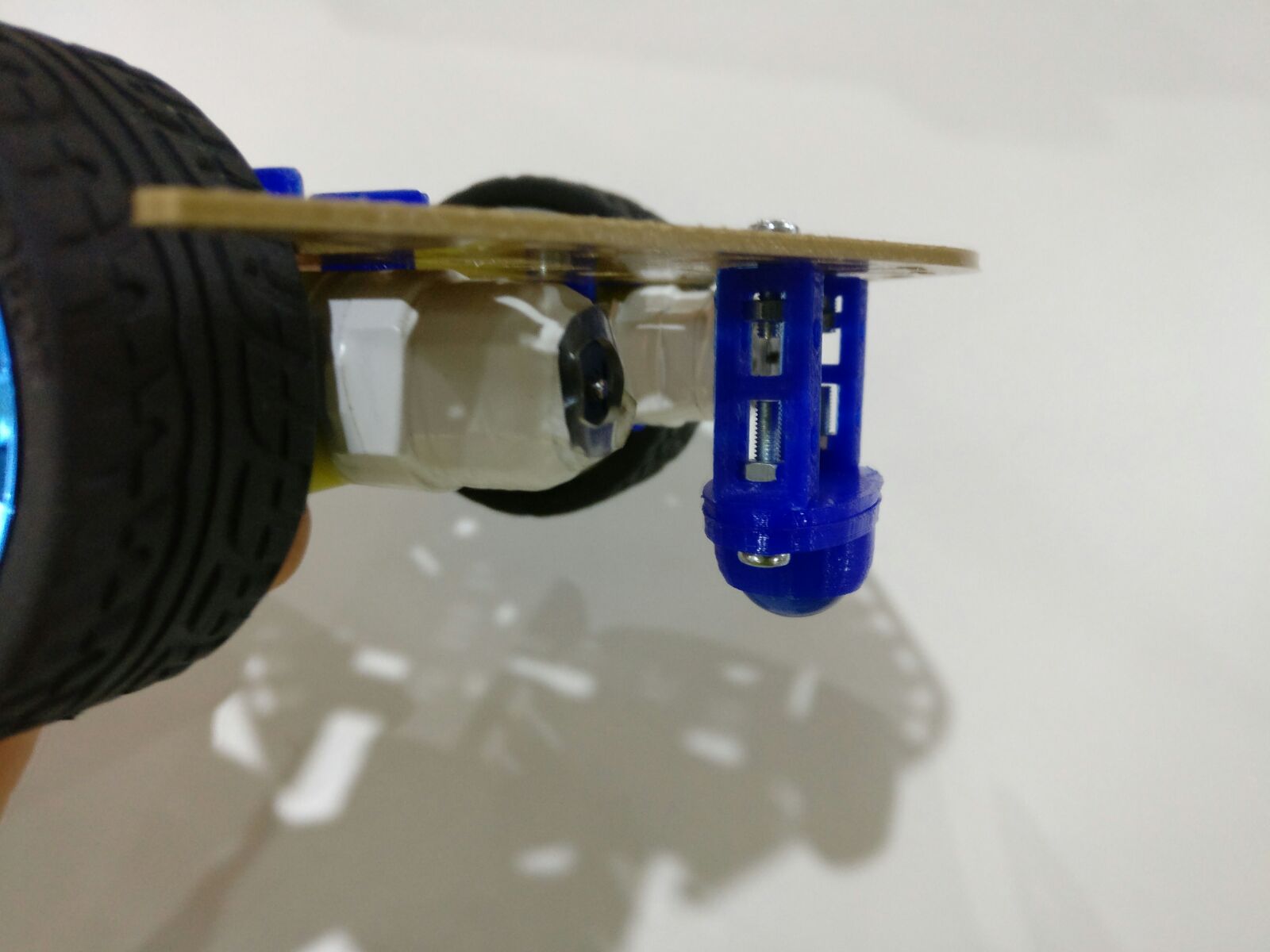
E infine otterremo questo:
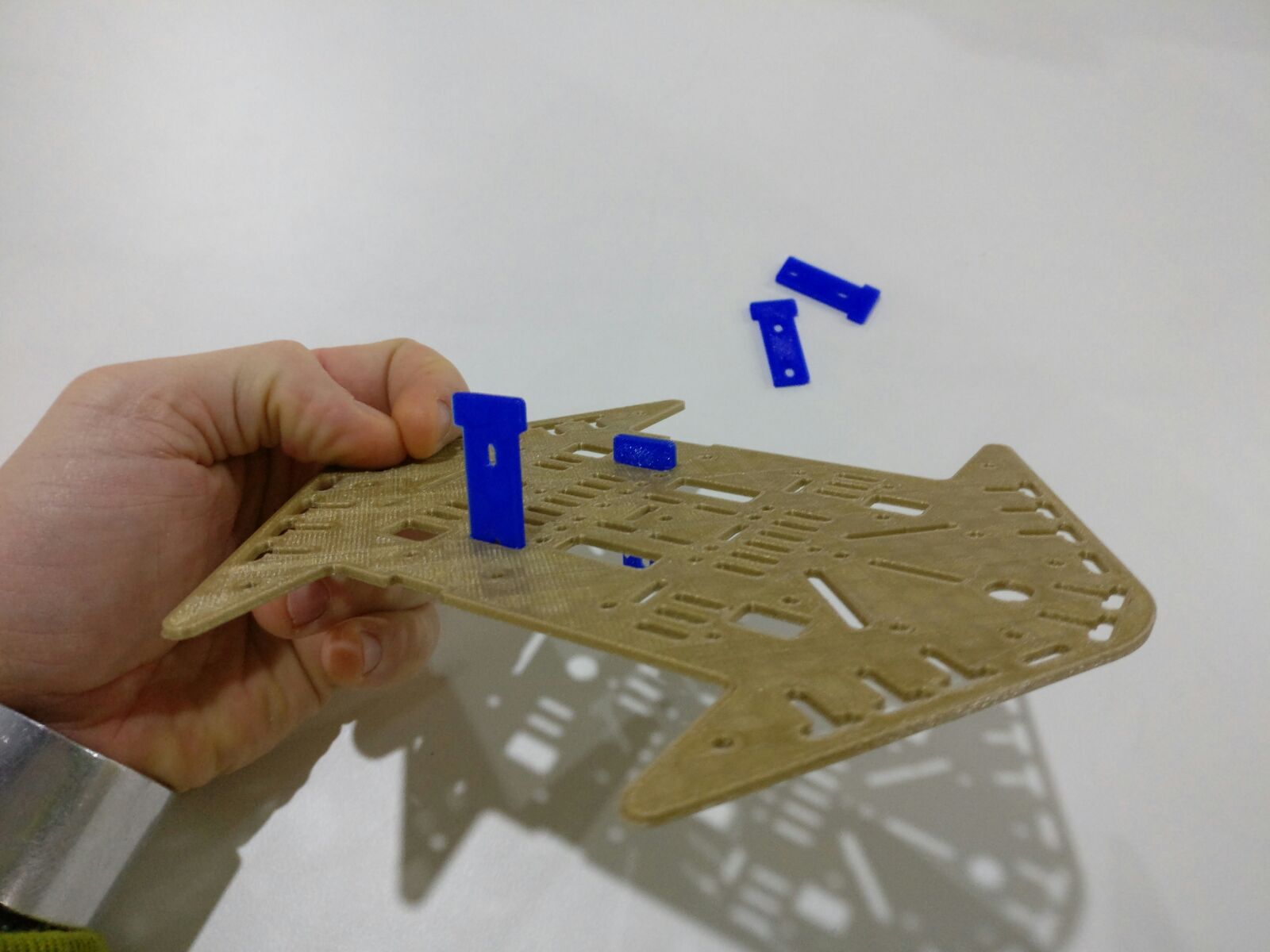
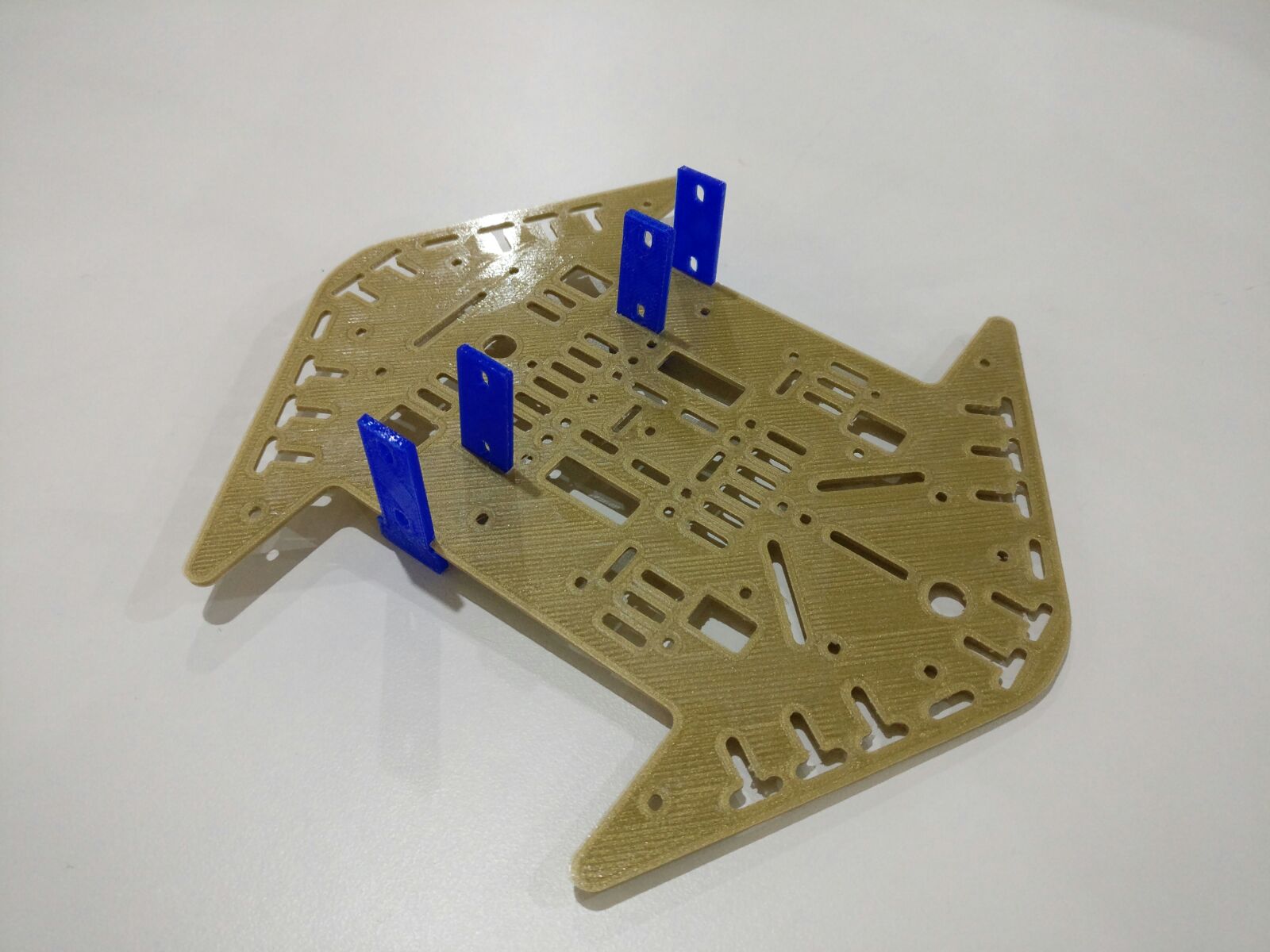
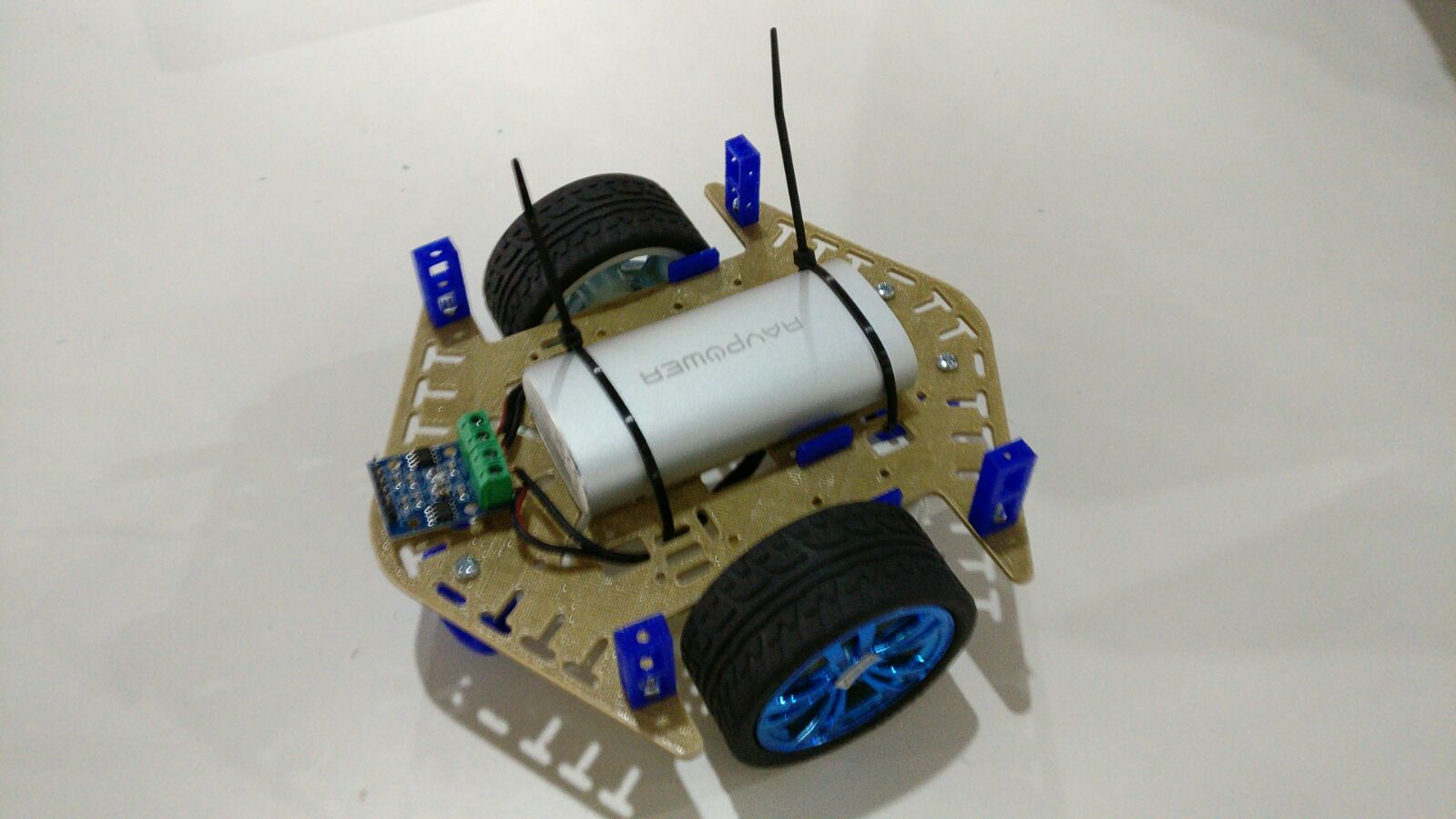
3 - Montaggio batterie - Inserimento driver motori - Inserimento giunti stampati in 3d per secondo livello##
Montate il driver motori inserendo i 4 cavi dei motori dentro i mammut della scheda driver. L'ordine non è importante perchè determina il verso che aggiusterete in fase di test. NB: testate invece con la batteria che i motori funzionino correttamente e non abbiano problemi.
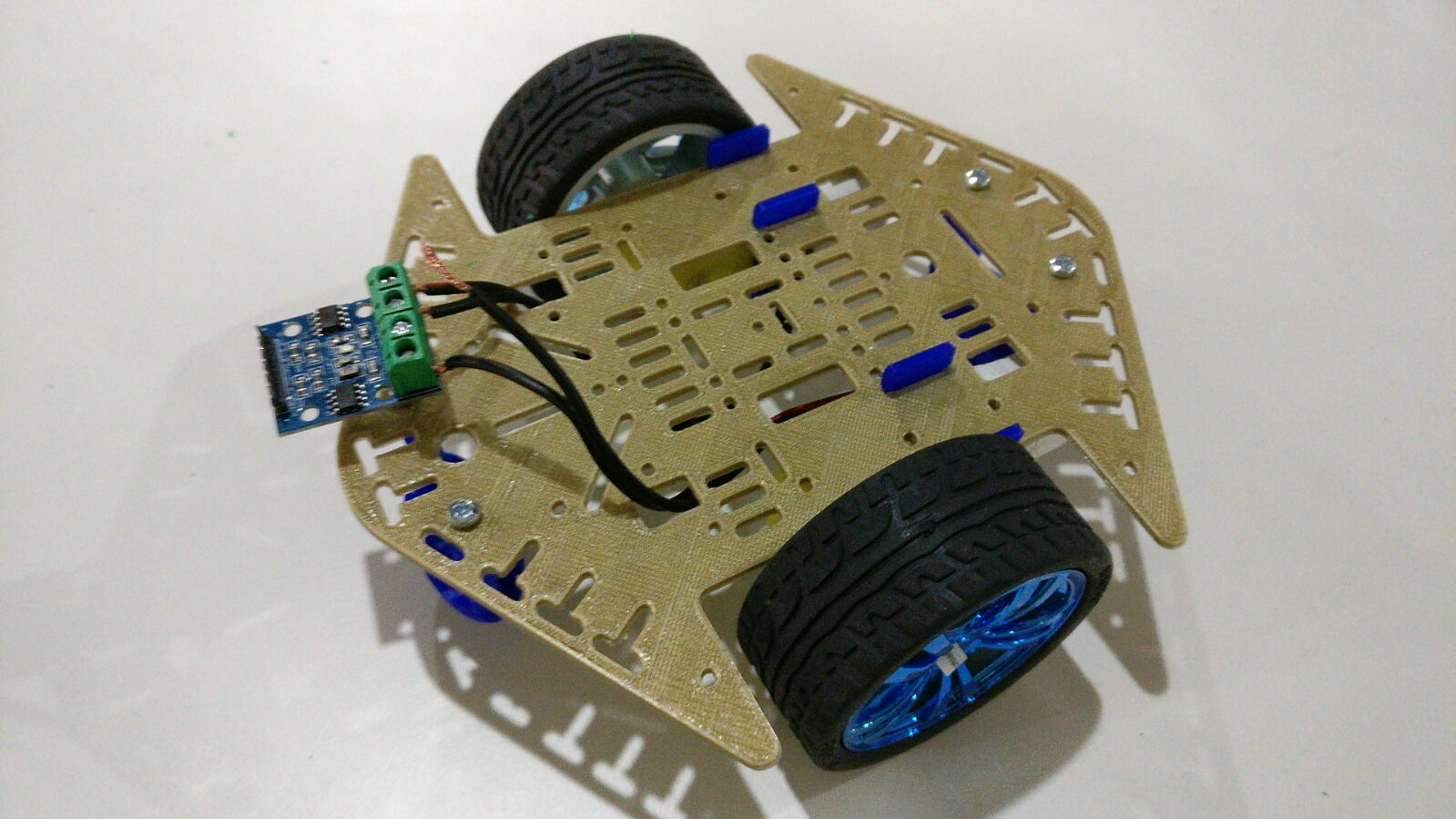
Montate la batteria con due fascette.
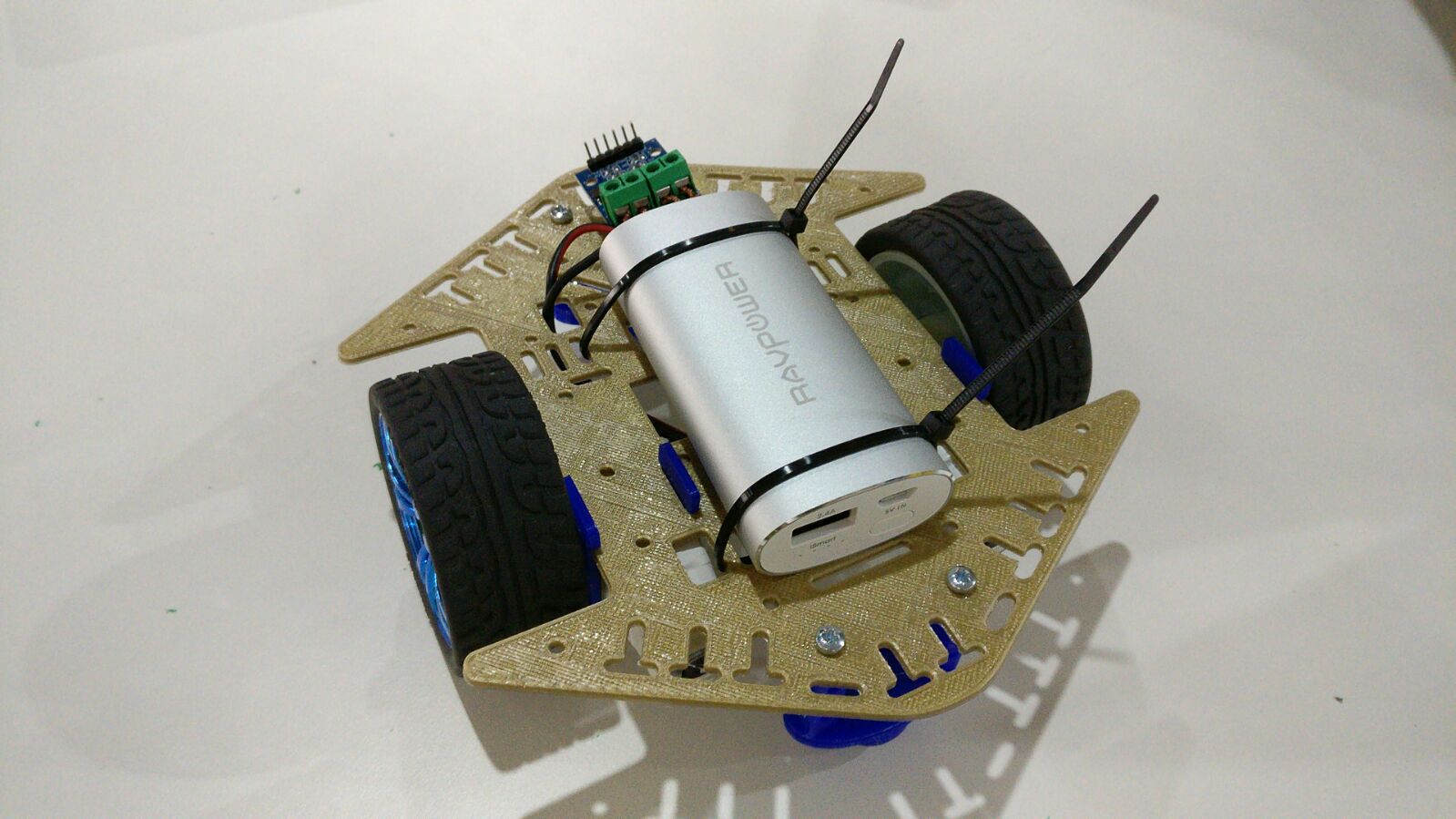
E infine i supporti verticali per il piano superiore.
4 - Fissaggio breadboard
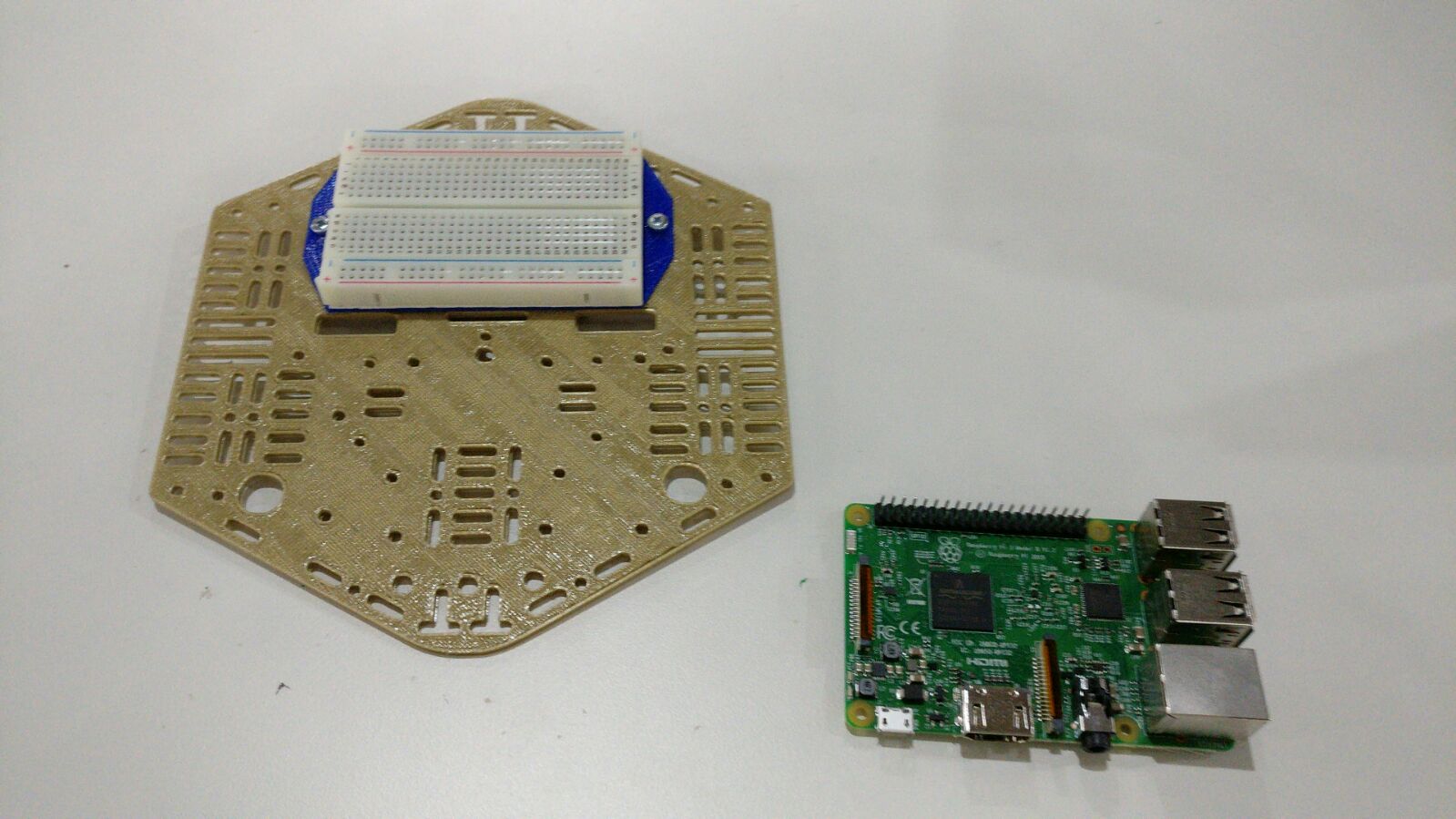
Ora avvitiamo il Raspberry e la parte superiore! E' più comodo se sotto il Raspberry mettete dello spessore, nel mio caso ho messo dei distanziali di plastica. ATTENZIONE state attenti a montare il Raspberry dalla parte giusta, ovvero con l'alimentazione che guarda verso l'esterno e non verso la bread board e mettete i supporti circolari (bulloni di supporto) sotto il Raspberry come in figura.
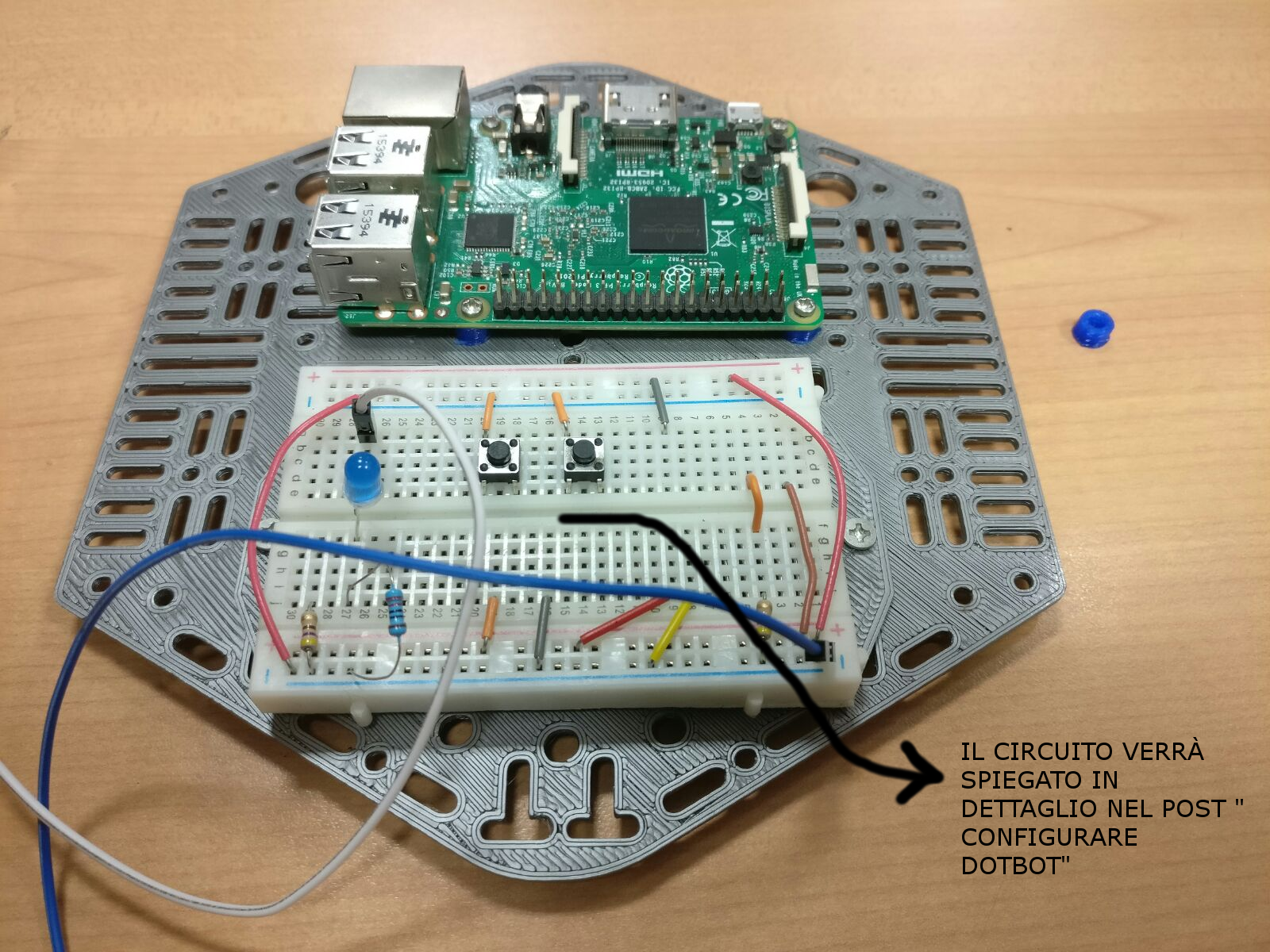
6 -Montate il circuito e fate i collegamenti
Allacciate con delle fascette la batteria alcalina da 9v e con questa alimentate la scheda motori. I fili di alimentazione vanno collegati nei due pin centrali della scheda GND e VCC.
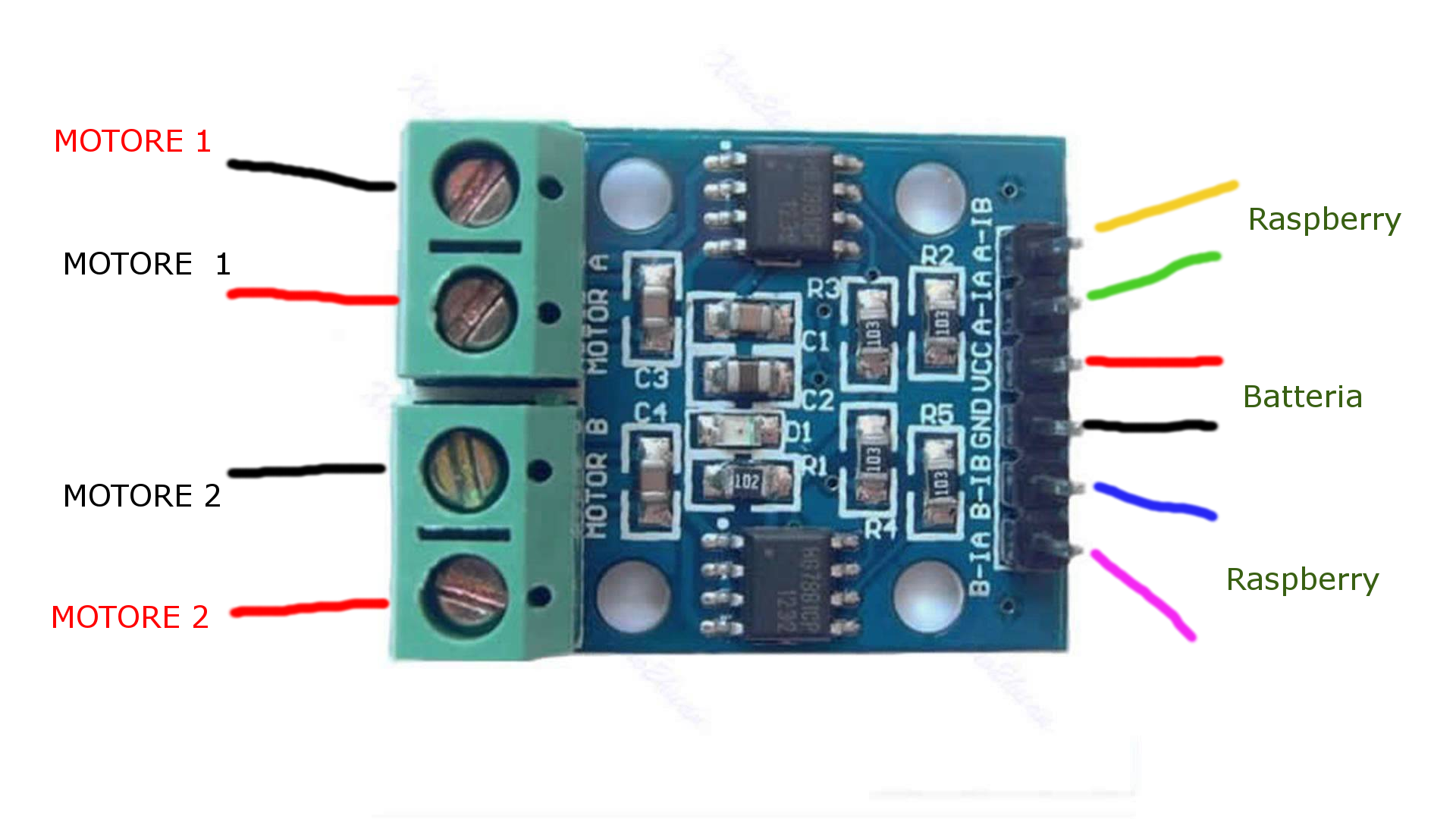
Ora inserite i fili di comando dei motori. Sono due per motore, tenendo conto che i pin del driver (c'è scritto comunque sopra) sono disposti cosi:
- pin 1 e 2 - controllo motore 1
- pin 3 e 4 - ground e alimentazione
- pin 5 e 6 - controllo motore 2
Il raspberry ha i pin configurati così:
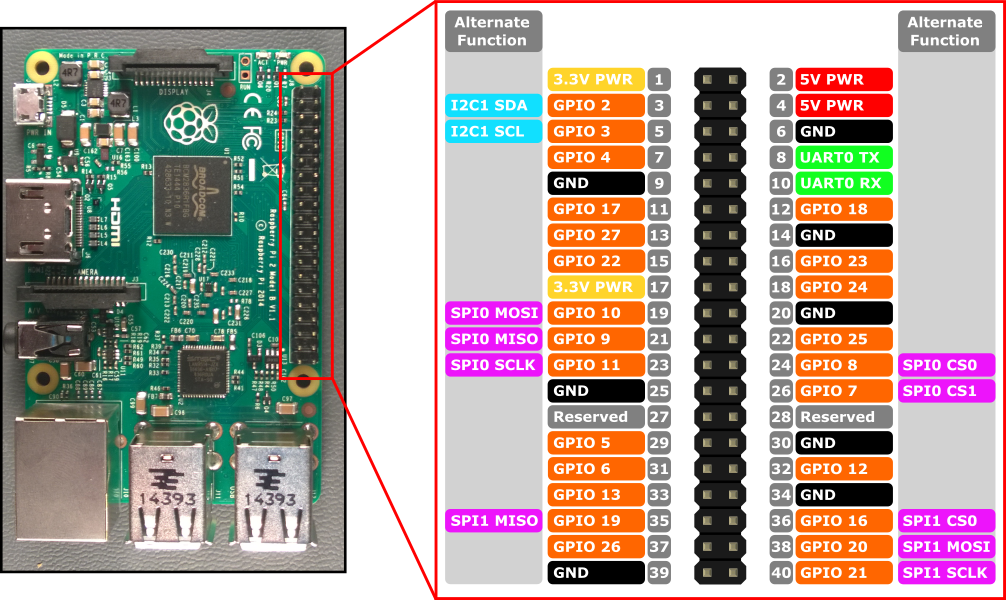
Nel nostro caso abbiamo i pin 3,5 per gli input e 4,6 Power e Ground per alimentare la breadboard. Collegate ogni alimentazione dei motori (motore A e motore B) ai rispettivi mammut del ponte ad H. Poi collegate il controllo dei motori (A-1A, A-1B e B-1A, B-1B) con i GPIO 9,25 (pin 21,22 o contando 10 dal basso) e GPIO 22,23 (pin 15,16 o contando 13 dal basso)del Raspberry. LED 1 GPIO 4 (pin 7). I pin 7,11,12 per i LED.
E otterete finalmente DotBot!
.jpeg)
.jpeg)