Webapp per il controllo del robot via frecce su WebApp

 In questo tutorial vedremo come creare una WebApp in grado di gestire il robot attraverso dei bottoni che fungono da frecce sulla pagina web. In particolare vedremo:
In questo tutorial vedremo come creare una WebApp in grado di gestire il robot attraverso dei bottoni che fungono da frecce sulla pagina web. In particolare vedremo:
- come sviluppare una WebApp in grado di controllare il robot attraverso le frecce (UP,DOWN,LEFT,RIGHT)
- come gestire la velocità del robot attraverso uno slider
- come sviluppare lo sketch in ROS per sottoscriversi al topic della
WebApp
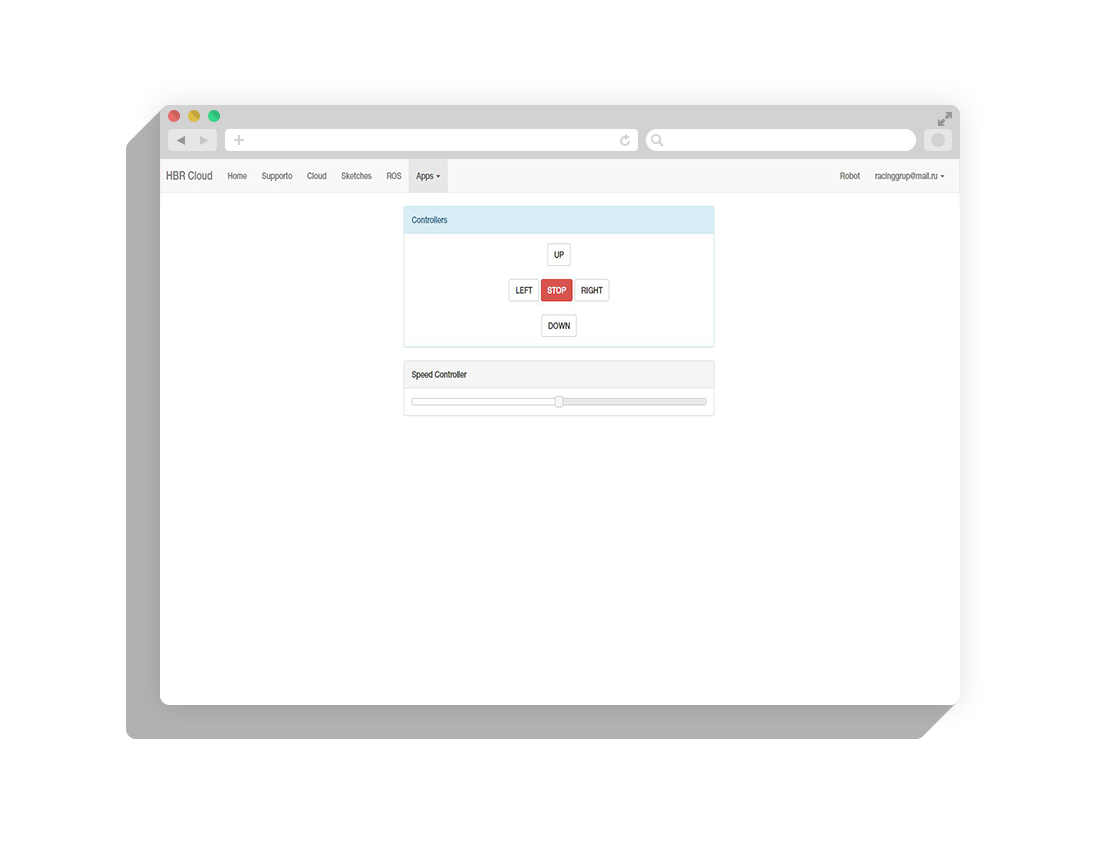
La webapp
Come prima cosa andiamo a sviluppare l'applicazione web che ci permetterà di controllare il robot tramite le frecce. Il codice Html lo potete trovare qui.
Analizziamo il codice: All'interno del file abbiamo la prima parte scritta in JavaScript che permette alla Webapp di comunicare con la piattaforma (riga 42).
<script type="text/javascript">
start_ros(
"192.168.0.108",
"cyberbot",
"192.168.0.108",
"192.168.0.108/bridge/"
);
</script>
IMPORTANTE: ricordate di modificare i campi '192.168.0.108' e 'cyberbot' inserendo l'IP e il nome del bot.
La seconda parte di questo file JavaScript si occupa di gestire la velocità (riga 47).
<script>
$(document).ready(function () {
function update() {
var cmdJoy = new ROSLIB.Topic({
ros: ros,
name: "/" + robot.name + "/velocita",
messageType: "std_msgs/Float32",
});
var tasks_time = $("#tasks_time").slider("value");
var joy = new ROSLIB.Message({
data: tasks_time,
});
cmdJoy.publish(joy);
}
$("#tasks_time").slider({
range: "max",
step: 0.1,
min: 0,
max: 1,
stop: function () {
update();
},
});
});
</script>
La funzione update() è un nodo publisher che si sottoscrive al topic /velocita ed invia i dati ogni volta che lo slider viene trascinato. La velocità deve essere espressa nel range tra 0 e 1 quindi utilizziamo il formato std_msgs/Float32
La terza funzione è myFunction (riga 209) , questa funzione viene chiamata ogni volta che l'utente fa click su uno dei pulsanti. Come parametro la funzione riceve la posizione di tipo String. Ogni volta che la funzione viene chiamata , il nodo si sottoscrive al topic /comando ed invia la direzione. A questo punto la parte relativa alla WebApp è completa e possiamo iniziare a scrivere lo sketch in Python su ROS.
Sketch ROS
Il primo passo è quello di importare le librerie:
import dotbot_ros
from sys import stdout
from std_msgs.msg import String
from std_msgs.msg import Float32
from gpiozero import Robot
La prima libreria è ovviamente quella di ROS, la seconda è stdout che ha il compito di forzare la stampa effettiva sulla shell. Le librerie successive sono quelle che ci servono per estrarre i valori, cioè String per la direzione e Float32 per la velocità. Importiamo l'oggetto Robot dalla libreria gpiozero per gestirne il movimento del robot.
Come al solito, il nostro programma è composto da un nodo ROS, la funzione principale è la funzione setup, che si occupa di inizializzare il robot e creare una callback di gestione.
self.speed = 0
self.posizione = 'none'
self.robot = Robot(left=(9, 10), right=(7, 8))
dotbot_ros.Subscriber('comando', String, self.direzione)
dotbot_ros.Subscriber('velocita', Float32, self.speedy)
Inizializziamo le variabili speed e posizione. Dopodichè cambiamo le coppie di Pin GPIO a cui sono collegate i due motori.
Sottoscriviamoci ai Topic ROS e usiamo le Callback.
dotbot_ros.Subscriber('comando', String, self.direzione)
Serve per sottoscriversi al nodo comando, ricevere una Stringa e passare i dati alla funzione di callback self.direzione. La stessa cosa vale per la velocità:
dotbot_ros.Subscriber('velocita', Float32, self.speedy)
Ci sottoscriviamo al nodo velocita , riceviamo un messaggio di tipo Float32 e passiamo i dati alla funzione di callback speedy.
La funzione che mette insieme la direzione e la velocità è:
def controller(self,speed,posizione):
if self.posizione == 'avanti':
self.robot.forward(self.speed)
elif self.posizione == 'indietro':
self.robot.backward(self.speed)
elif self.posizione == 'destra':
self.robot.right(self.speed)
elif self.posizione == 'sinistra':
self.robot.left(self.speed)
elif self.posizione == 'stop':
self.robot.stop()
Questa funzione riceve come parametro self (rappresenta il nodo), speed (la velocità) e posizione. La funzione controller viene chiamata in 2 casi:
- Quando viene eseguita la funzione di callback "speedy":
def speedy(self, msg):
self.speed = msg.data
self.controller(self.speed,self.posizione)
- Quando viene eseguita la funzione di callback "direzione":
def direzione(self, msg):
self.posizione = msg.data
self.controller(self.speed,self.posizione)
N.B: Queste due funzioni non possono funzionare indipendentemente. Perchè il robot non può muoversi senza la velocità e senza direzione.
Codice completo
Ecco il codice completo del nostro programma
import dotbot_ros
from sys import stdout
from std_msgs.msg import String
from std_msgs.msg import Float32
from gpiozero import Robot
class Node(dotbot_ros.DotbotNode):
node_name = 'webapp'
def setup(self):
self.speed = 0
self.posizione = 'none'
self.robot = Robot(left=(9, 10), right=(7, 8))
dotbot_ros.Subscriber('comando', String, self.direzione)
dotbot_ros.Subscriber('velocita', Float32, self.speedy)
def controller(self,speed,posizione):
if self.posizione == 'avanti':
self.robot.forward(self.speed)
elif self.posizione == 'indietro':
self.robot.backward(self.speed)
elif self.posizione == 'destra':
self.robot.right(self.speed)
elif self.posizione == 'sinistra':
self.robot.left(self.speed)
elif self.posizione == 'stop':
self.robot.stop()
def speedy(self, msg):
self.speed = msg.data
self.controller(self.speed,self.posizione)
def direzione(self, msg):
self.posizione = msg.data
self.controller(self.speed,self.posizione)